부제: 시스템 오류인가, 예측 불가능한 변수인가? 로보택시 사고 분석 리포트
1. 샌프란시스코의 비명, “사람이 깔렸는데 멈추지 않았다”
2023년 10월의 어느 밤, 샌프란시스코 시내. 한 여성이 횡단보도를 건너다 뺑소니 차량에 치여 옆 차선으로 튕겨 나갔습니다. 비극은 여기서 끝나지 않았습니다.
옆 차선에서 달려오던 GM의 자율주행 택시 ‘크루즈(Cruise)’는 쓰러진 여성을 감지하지 못한 채 그대로 덮쳤고, 설상가상으로 상황을 파악하지 못한 AI는 차를 갓길로 대기 위해 여성을 매단 채 6미터나 더 주행했습니다.
이 끔찍한 사고는 전 세계에 충격을 주었습니다. “인간보다 안전하다”던 자율주행 시스템이 눈앞에 쓰러진 사람조차 인식하지 못하고, 즉시 브레이크를 밟기는커녕 주행을 지속했다는 사실은 기술에 대한 근본적인 불신을 낳았습니다. 구글 웨이모(Waymo) 역시 자전거를 탄 사람을 보지 못하고 충돌하거나, 소방차의 사이렌 소리를 듣고도 길을 막고 멈춰 서는 등 크고 작은 사고가 끊이지 않고 있습니다.
우리는 묻지 않을 수 없습니다. 수조 원의 개발비가 들어간 이 최첨단 기계 덩어리들이 왜 ‘멈춤’이라는 가장 기초적인 동작에서 오류를 일으키는 걸까요? 단순한 버그일까요, 아니면 아직 인류가 정복하지 못한 기술의 거대한 벽일까요?
2. 왜 멈추지 못했나? : 시스템 오류의 3가지 ‘블랙박스’
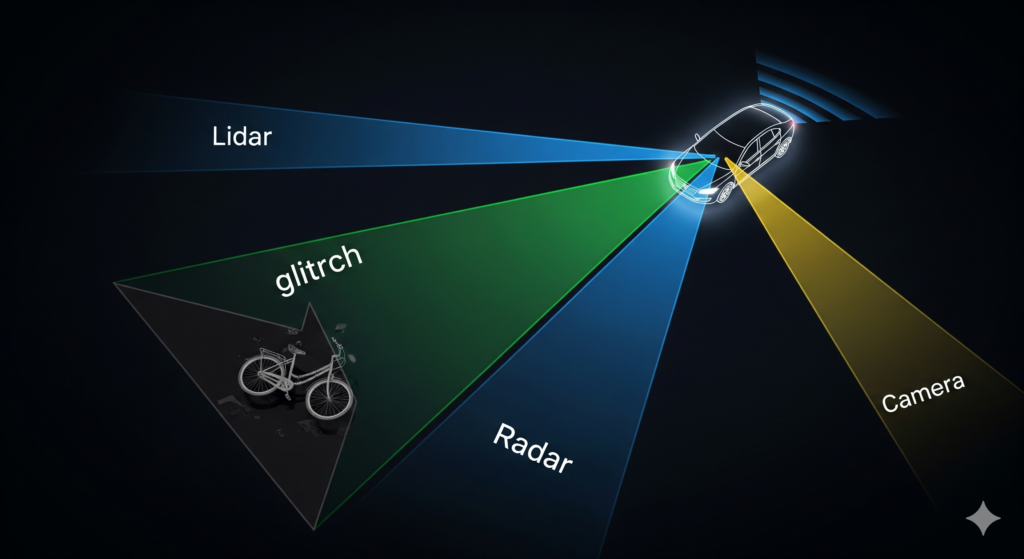
자율주행차는 라이다(LiDAR), 레이더(Radar), 카메라 등 수십 개의 센서로 세상을 봅니다. 이론적으로는 사각지대가 없어야 합니다. 하지만 현실 도로 위에서는 예상치 못한 변수들이 AI의 눈과 뇌를 마비시킵니다. 전문가들은 사고의 원인을 크게 세 가지 기술적 결함으로 분석합니다.
자율주행차는 여러 센서가 보내온 정보를 하나로 합쳐(Fusion) 상황을 판단합니다. 문제는 센서 간의 정보가 충돌할 때 발생합니다.
예를 들어, 카메라는 전방의 물체를 ‘비닐봉지’로 인식했는데, 라이다는 ‘딱딱한 물체’로 인식했다고 가정해 봅시다. AI는 순간적으로 어떤 센서의 데이터를 신뢰할지 결정해야 합니다.
“불필요한 급제동(Phantom Braking)을 막아 승객의 승차감을 해치지 말라”는 알고리즘이 우선순위에 있다면, AI는 이를 무시하고 주행을 선택할 수 있습니다. 크루즈 사고 역시 바닥에 쓰러진 사람을 입체적인 장애물로 명확히 인지하지 못했을 가능성이 큽니다.
AI는 학습한 데이터를 기반으로 움직입니다. 수백만 km를 주행하며 데이터를 쌓았다고 해도, 세상에는 학습하지 못한 희귀한 상황, 즉 ‘엣지 케이스’가 무수히 존재합니다.
도로 한가운데서 춤을 추는 사람, 거꾸로 뒤집힌 트럭, 연기를 내뿜는 맨홀, 공사 중이라 수신호를 보내는 경찰관 등은 AI에게 낯선 풍경입니다.
학습 데이터에 없는 상황을 마주했을 때, AI는 패닉에 빠지거나 엉뚱한 판단(가속이나 주행 지속)을 내릴 수 있습니다. “모르는 상황이면 멈춘다”는 로직조차, 뒤따르는 차와의 추돌 위험 때문에 쉽게 실행되지 않도록 설정된 경우가 많습니다.
진정한 자율주행은 현재를 보는 것을 넘어, 3초 뒤의 미래를 예측해야 합니다. “저 자전거가 갑자기 좌회전을 할까?”, “저 보행자가 튀어나올까?”를 계산해야 하죠.
하지만 인간의 행동은 비이성적이고 예측 불가능합니다. 무단횡단을 하려다 멈칫하는 사람, 비틀거리는 취객 등의 움직임을 수학적 확률로만 계산하려다 보니, 예측 범위를 벗어난 행동에 대해 브레이크 타이밍을 놓치게 됩니다. 이는 하드웨어의 문제가 아닌, 소프트웨어 알고리즘의 본질적인 한계입니다.
3. 팬텀 브레이킹: 서지 말아야 할 때 서는 공포

반대로 브레이크가 너무 민감해서 생기는 문제도 심각합니다. 아무것도 없는 도로에서 급정거해 뒤차의 추돌을 유발하는 ‘팬텀 브레이킹(Phantom Braking, 유령 급제동)’ 현상입니다. 테슬라 FSD나 여러 로보택시에서 빈번하게 보고되는 이 현상은 그림자를 장애물로 착각하거나, 표지판을 사람으로 오인해서 발생합니다.
제조사 입장에서는 ‘사고를 내느니 멈추는 게 낫다’는 보수적인 세팅을 할 수밖에 없지만, 이는 고속도로나 혼잡한 도심에서 연쇄 추돌이라는 또 다른 대형 사고를 부르는 양날의 검이 되고 있습니다. 멈춰야 할 때 안 멈추고, 안 멈춰도 될 때 멈추는 것. 이것이 현재 과도기 자율주행 기술이 안고 있는 최대의 난제입니다.
4. [대안과 전망] 안전한 로보택시는 언제 오는가?
잇따른 사고로 로보택시 산업은 잠시 주춤하고 있습니다. 하지만 기술의 진보는 멈추지 않을 것입니다. 현재의 한계를 극복하고 신뢰를 회복하기 위해 업계는 어떤 노력을 하고 있을까요?
차량 혼자만의 센서로는 한계가 있습니다. 도로 인프라(신호등, CCTV) 및 다른 차량과 통신하며 정보를 주고받는 **V2X(Vehicle to Everything)** 기술이 필수적입니다. 사각지대에서 튀어나오는 차량이나 보행자 정보를 신호등이 미리 로보택시에 알려준다면, 센서가 놓치더라도 브레이크를 잡을 수 있습니다.
완전 무인화는 시기상조라는 지적에 따라, AI가 판단하기 어려운 상황에서는 원격 관제 센터의 인간 오퍼레이터가 개입하는 하이브리드 시스템이 강화되고 있습니다. 사고 위험이 감지되면 즉시 인간이 원격으로 브레이크를 제어하거나 경로를 수정해 주는 방식입니다.
정부 당국은 무조건적인 허용보다는 더 엄격한 안전 기준을 요구하고 있습니다. 사고 발생 시 데이터를 투명하게 공개하고, 특정 시나리오(악천후, 복잡한 교차로 등)에서의 주행 능력을 검증하는 테스트 베드를 확대하여 기술의 성숙도를 높여야 합니다.
5. 에필로그: 혁신의 속도보다 중요한 것
“빠르게 움직여라, 그리고 파괴하라(Move fast and break things).”
실리콘밸리의 격언이지만, 사람의 생명이 걸린 모빌리티 분야에서는 통용될 수 없는 말입니다. 로보택시는 분명 교통 약자에게 이동의 자유를 주고 물류 혁명을 가져올 미래 기술입니다. 하지만 그 미래가 누군가의 희생 위에 세워져서는 안 됩니다.
지금 우리에게 필요한 것은 더 빠른 자율주행차가 아니라, 더 안전하게 멈출 줄 아는 자동차입니다. 기술적 완성도가 99%에 도달했더라도, 나머지 1%의 불안전성이 해소되지 않는다면 핸들을 놓을 수 없습니다. 혁신의 속도 조절이 필요한 시점, 결국 기술의 중심에는 ‘사람’이 있어야 합니다.
[부록] 자율주행 시대, 우리가 알아야 할 상식
- ✔
로보택시 탑승 시: 비상 정지 버튼의 위치를 미리 확인하고, 안전벨트는 필수 착용 - ✔
도로 공유 시: 주변에 ‘운전자 없는 차’가 보이면 예측 불가능한 움직임(급정거 등)에 대비해 안전거리를 평소보다 길게 유지 - ✔
사고 발생 시: 로보택시와 사고가 났을 경우, 차량 내외부에 부착된 고객센터 번호로 즉시 신고하고 경찰에 접수 (데이터 확보 중요) - ✔
책임 소재: 현재 레벨 3 이하 자율주행 기술의 사고 책임은 대부분 ‘운전자’에게 있으나, 로보택시(레벨 4)는 ‘운영사/제조사’ 책임이 큼